







|
|
|
|
|
|
|
|
SATELLITE ORBITAL CONJUNCTION REPORTS ASSESSING THREATENING ENCOUNTERS IN SPACE (SOCRATES)T.S. Kelso1 and S. Alfano21 Center for Space Standards & Innovation, 7150 Campus Drive, Suite 260, Colorado Springs, CO, USA 80920-6522.
2 Center for Space Standards & Innovation, 7150 Campus Drive, Suite 260, Colorado Springs, CO, USA 80920-6522.
INTRODUCTIONAs of 2005 August 15, NORAD tracks 9,379 in earth orbit, of which 2,954 are designated as
payloads. While not all of these payloads are still active, about a third are and they perform a
variety of important tasks—many vital to the global economy. Since these payloads tend to
operate in a limited orbital regime (i.e., they are not randomly distributed) and share that
regime with the rocket bodies, upper stages, and associated debris which put them in orbit, the
potential exists that any of these payloads might collide with another object on orbit. At
relative velocities up to 15 km/s, the results of such a collision would be catastrophic. In the
geostationary belt, such a collision would generate debris which would drift around the belt
indefinitely, putting at risk all other payloads in that orbit.
While many satellite operators are aware of the possibility of a collision between their
satellite and another object in earth orbit, most seem unaware of the frequency of near misses
occurring each day. Until recently, no service existed to advise satellite operators of an
impending conjunction of a satellite payload with another satellite, putting the responsibility
for determining these occurrences squarely on the satellite operator’s shoulders. This problem
has been further confounded by the lack of a timely, comprehensive data set of satellite orbital
element sets and computationally efficient tools to provide predictions using industry-
standard software. As a result, hundreds of conjunctions within 1 km occur each week – with
little or no intervention – putting billions of dollars of space hardware at risk, along with their
associated missions.
As a service to the satellite operator community, the Center for Space Standards &
Innovation (CSSI) offers Satellite Orbital Conjunction Reports Assessing Threatening
Encounters in Space (SOCRATES). Each day, CSSI runs the list of all satellite payloads against the list of all objects on orbit using the catalog of unclassified NORAD two-line
element sets (TLEs) to look for conjunctions over the next seven days. The runs are made
using Satellite Tool Kit’s Conjunction Analysis Tools (STK/CAT) with the NORAD SGP4
propagator in STK.
BACKGROUNDBeginning in May of 2004, CSSI began providing daily reports of likely conjunctions for the
upcoming week to the public. Those reports are provided in a special section of the CelesTrak
web site and are available to all users. There are no fees or restrictions for this service. As of
this writing, no comparable service has ever been provided to the public.
The goal of this service is to provide a reliable tool for satellite users to help them assess
whether their payloads might have predicted conjunctions which could require further
analysis. For this tool to be considered reliable, it needs to use a comprehensive database of
orbital data, along with standard orbital models, and be generated using accepted techniques.
It also has to be provided on a regular basis to allow incorporation of the results into daily
operational planning.
To meet this goal, SOCRATES uses the most comprehensive orbital database currently
available – the NORAD two-line element sets. These data are updated twice each day and
made available electronically via the new Space Track web site. That database is not fully
comprehensive, however, because it intentionally omits those satellites deemed vital to US
national security – about 185 payloads along with the associated rocket bodies and upper
stages which delivered them to orbit. Even so, current orbital data is available for 8,593 of the
9,379 objects (about 91 percent) cataloged by NORAD. Not all of these missing objects are
for restricted objects, though. Some are considered ‘lost’ since they have not been tracked for
the past 30 days. It should also be noted that this database does not include those objects too
small to be detected or regularly tracked by the US Space Surveillance Network (SSN) nor
does it include the roughly 4,000 objects considered to be analyst satellites.
Since TLEs are generated from SSN observations using the SGP4 (Simplified General
Perturbations) orbital theory which uses mean elements, the same version of SGP4 must be
used for predictions in order to minimize modeling errors. While a version of SGP4 was
released to the public in 1980 in Spacetrack Report Number 3 (Hoots, 1980), subsequent
modifications were made in 1990 and 1992 which were not released and are considered US
export controlled. Most of these changes were to correct errors in the original code for
handling special cases in the deep-space portion of the model and other researchers have
independently found and corrected these errors in their implementations of SGP4. Extensive
testing of the version of SGP4 implemented in STK against known ‘hard’ cases has shown
that it matches the official NORAD version quite well. However, without a standard released
version of SGP4 along with a version control history, there will always be some additional
level of modeling error in these predictions.
The final requirement for a reliable tool is to have a systematic way to search for all
relevant conjunctions in a computationally efficient manner. With current searches comparing
2,686 payloads against 8,593 (as of 2005 August 17) total objects over a one-week period, an
inefficient search strategy could be so computationally intensive that it would be impossible
to produce a timely report on a daily basis. STK/CAT implements a number of standard pre-
filters (out-of-date TLE, apogee/perigee, orbit path, and time) to reduce the overall
computational complexity of this task. This allows current runs to be made on a 3.2 GHz,
Pentium 4 with 2 GB of RAM in just 85 minutes. Efforts are currently underway to further
improve the efficiency of STK/CAT’s filters to provide even more timely results.
Not only does STK/CAT calculate the minimum distance at the time of closest approach
(TCA) for all conjunctions matching the user-specified criteria, it also provides calculations
of the true probability and the maximum probability of collision. Because the minimum-
distance method ignores position covariance and can lead to an exaggerated assessment of the
true risk, CSSI believes the probability-based methods provide a more reasonable assessment
of the true risk (Gist, 1999). For those cases where the actual covariances for the conjuncting
objects are known, STK/CAT calculates the true probability of collision for that event.
For cases where no covariance data exists or data quality is insufficient, STK/CAT
calculates the maximum probability of collision (Alfano, 2003). Unfortunately, the generation
of TLEs does not produce covariance data and the maximum-probability method is, therefore,
the only way – in the absence of covariance data – to generate a stochastic assessment of the
probability of collision.
It is possible, however, to estimate the covariance associated with a given TLE by
examining recent historical TLEs for the same object. The method currently under
investigation by CSSI takes the historical TLEs for a particular object for the period of twice
the prediction interval prior to the current date. A pair wise comparison of all TLEs is
performed to generate predictions at the epoch of each TLE. The TLE associated with the
epoch prediction time is considered the primary TLE and the relative position of the
secondary TLE is calculated in the VNC (velocity-normal-conormal) coordinate system for
the primary TLE. The VNC components are then plotted against the difference in epoch times
to illustrate how prediction ‘error’ – actually, the difference between the two predictions –
grows over time in each dimension. The presumption here is that the actual prediction error at
the TLE epoch is minimal. An example of such a plot is shown in Fig. 1.
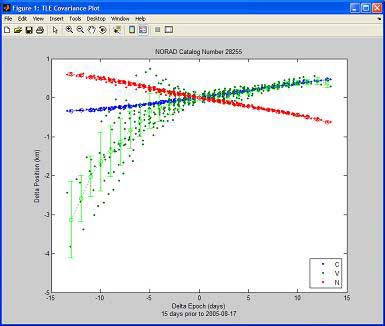 Fig. 1. VNC Error vs. Delta Epoch Time
An estimate of the covariance value at the epoch and its growth over time can be
developed by binning the VNC ‘errors’ and calculating the sample mean and standard
deviation for each bin. A time-varying bias can be calculated by simply interpolating between
the mean bin values and then subtracted from the predicted position to produce a zero-bias
mean. The resulting sample standard deviations (which are now smaller because we did not
assume zero bias) then show the expected growth in prediction error.
CSSI currently plans to enhance the daily SOCRATES runs by generating pseudo-
covariance data for each object, with the approach just described, and using that data within
the true probability calculations in STK/CAT to provide a more realistic assessment of the
probability of collision. Until then, satellite operators can selectively apply the same
methodology for the specific objects in a particular conjunction to refine their estimate of the
risk of collision. Future versions of STK/CAT will hopefully incorporate this capability to
facilitate user analysis.
METHODOLOGYEach SOCRATES run begins with the release of a new database from the Space Track web
site. The data is first partitioned into two sets – payloads only and all objects – to facilitate
setup for STK/CAT. Searches are currently limited to conjunctions involving payloads to give
satellite operators an opportunity to plan – or obtain planning services – to move their
satellites out of harm's way (if their satellite is maneuverable), or to take other appropriate
measures. Since there currently is no way of knowing which payloads are still active, all
payloads still on orbit are considered in the daily analysis. STK/CAT is set to look for all
conjunctions which are within 1 km at the time of closest approach and reports minimum
distance and the maximum probability for each conjunction. Maximum probability is
calculated assuming an aspect ratio of 1 and using a developmental database of object sizes
compiled from publicly available sources by The Aerospace Corporation. An effort is
underway to provide an even more robust and extensively validated database of sizes
(Isakowitz, 2004; Martin, 2000; Baker, 2002).
The actual STK/CAT runs for SOCRATES are kicked off at 0130 and 1230 UTC each
day. Each run finishes in about 85 minutes and the conjunction advisory reports and
associated data are uploaded to CelesTrak as soon as they are completed.
Each upload includes Top 10 lists sorted by maximum probability (see the example in
Fig. 2) and minimum distance at TCA, together with a fully searchable set of all predicted
conjunctions matching the input criteria. Searches can be conducted using common name or
NORAD Catalog Number and sorted by maximum probability, minimum distance at TCA, or
start time for the conjunction. Each report shows basic information defining which satellites
are involved in the conjunction along with the specific time and circumstances of the event.
A typical report shows on the order of 250 predicted conjunctions within the 1-km
computation threshold over the 7-day forecast period. Since the typical error at the end of the
forecast period is more on the order of 10 km, CSSI plans to eventually open the computation
threshold to 10 km, but preliminary tests show on the order 25,000 conjunctions within 10 km
over a 7-day forecast period. Refinements in processing and associated benchmarking are
being conducted prior to implementation.
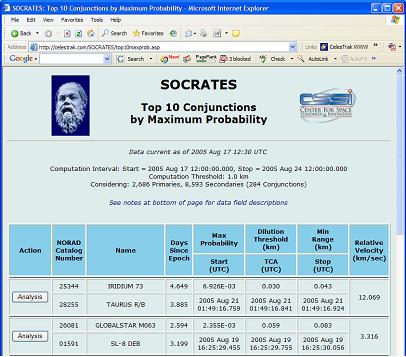 Fig. 2. SOCRATES Top 10 Conjunctions by Maximum Probability
Perhaps the most powerful aspect of SOCRATES is the ability to immediately build a
complete conjunction scenario for enhanced analysis at the push of a button. Each conjunction
entry has an Analysis button which brings up a window like the one in Fig. 3. The window
contains the basic information used to generate the report (currently only the TLEs) to allow
the user to use the data within their preferred analysis software. If the user has STK, however,
they can launch STK directly from their web browser and build the complete STK/CAT
scenario on the fly, complete with stored viewpoints for threshold start, closest approach, and
threshold end.
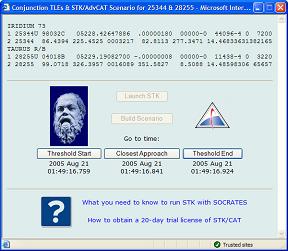 Fig. 3. SOCRATES Conjunction Analysis Screen
The ability to build a standard conjunction scenario at the push of a button enables the
user to quickly conduct analysis rather than spending time collecting and formatting the data
and then independently constructing what can often be a fairly complex scenario. For a
typical satellite operator, they can now focus on inputting more refined data that might be available for their constellation (e.g., more precise ephemeris and covariance data), thus pro-
viding a much better assessment of the risk than available solely from the TLEs. It also allows
them to readily conduct maneuver planning, using tools such as STK/Astrogator or
MATLAB, for maneuvers to further minimize the risk, should they determine such action is
necessary.
The data for each conjunction is made as realistic as possible, using true-scale models of
spacecraft and debris, along with attitude information, if available. CSSI is developing a
database which will map each NORAD Catalog Number to a model and attitude profile for
use in scenario generation. When attitude information is unknown, an attitude uncertainty
sphere is put around the model with a diameter equal to the largest dimension of the object.
Covariance data is notional, although current research efforts should provide pseudo-
covariance data in the near future.
Soon, even non-STK users will be able to interactively view conjunctions reported in
SOCRATES using the new AGI Viewer software, which is now available free of charge via
AGI’s web site (http://www.agi.com). Viewer Definition Format (VDF) files will be produced
for the top conjunctions and then linked to that SOCRATES report. A screen shot from a
sample VDF scenario is shown below in Fig. 4. SOCRATES users may then download the
file and interactively manipulate the scenario (zoom, pan, and control animation time) to get a
better visual impression of that conjunction. It is hoped that these VDF scenarios will help a
wider audience develop a better appreciation of just how close a near miss can be.
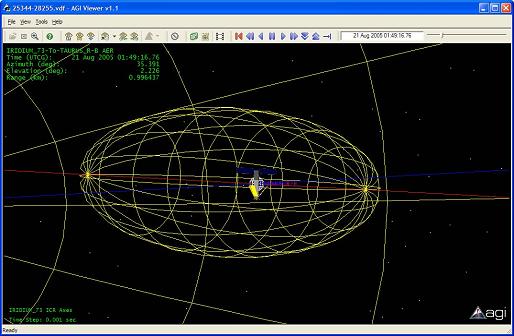 Fig. 4. SOCRATES-Generated STK/CAT Scenario
CONCLUSIONSThis paper has shown how SOCRATES was developed to combine standard data products
(NORAD TLEs), along with their associated orbital models (SGP4), in existing commercial-
off-the shelf software (STK) to provide a regular situational report which can help satellite
operators avoid undesired close approaches through advanced mission planning. It has also
demonstrated how these products can be combined – on the fly – into a three-dimensional analysis framework to fully explore the circumstances of a particular conjunction and possible
mitigation approaches.
Several advantages to the SOCRATES methodology should be readily apparent. The
standardized systematic approach to collecting and processing the data ensures data
validation, scenario development, and report generation are applied in a consistent manner.
Centralized report generation and distributed advanced analysis maximizes computational
efficiency by eliminating the need for each user to obtain full catalog data and run it against
all of their satellites of interest. Plus, the simple web interface makes the somewhat complex
and tedious task of collecting and formatting data to build the conjunction scenario(s)
transparent and helps to eliminate the possibility of errors in that portion of the task, thus
allowing the user to focus immediately on more detailed analysis. In addition to the obvious
benefits SOCRATES provides to satellite operations, it is also hoped that these reports will
help educate the public as to the circumstances and numbers of conjunctions occurring each
day and demonstrate the feasibility of a regular process.
REFERENCES
Размещен 29 ноября 2006.
|
|
|
|
|
|
|
|
|
